社会に貢献するシステムデザインの創出
メカトロニクスとは
メカトロニクスは,機械工学,電気電子工学,制御工学,情報工学など幅広い領域の交点にあり各領域と密接な関わりを持つ工学分野です.車両・工作機械・ロボットなどに代表される一般的なメカトロニクスシステムは,所望機能を実現する機構と,それを駆動するアクチュエータ,システム内外の情報を得るためのセンサ,そして全体を統括する制御装置とソフトウェアにより構成され,文字通り陸・海・空の各方面で活躍しています.
メカトロニクスシステムを対象とした研究では,様々な領域で培われた広範な知識に習熟することと共に,それらを適切に融合させて有用なシステムを創出する力が求められます.「知識とその総合」を両輪とした各種システムの設計・解析が世界中の研究機関で進められています.本研究室においても精力的に知見を深め,その基盤に立脚した考察を通じて「役に立つシステム」の構築を目指しています.

主要研究テーマは「移動」
本研究室はメカトロニクス全般を考察対象としています.その中で注力しているテーマの一つがシステムの移動機能です.動物である人類にとって「移動」は非常に重要な意味を持っています.例えば栄養補給のためには,食物あるいはその材料を居所まで「運ぶ」または自ら食事が摂れる環境へ「行く」という動作が不可欠です.現代社会における情報・通信技術の重要性は論を俟ちませんが,それらと並行して「実世界で物体を移動すること」は,人が為す根源的な事象であると考えられます.
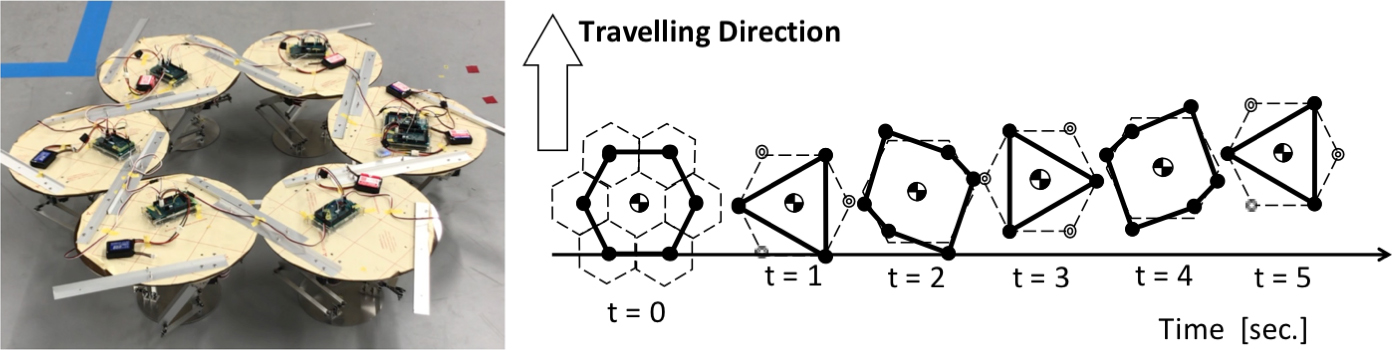
人間が行なう「移動」を伴うタスクは,農林水産業に必須である重量物運搬,森林・砂漠・雪氷原等の不整地踏破,深海・宇宙等の極限環境における調査・探査など枚挙に遑がありません.そしてこれらのタスク毎に,さらにはタスク遂行中の場面毎に,安定性・運動量・踏破性・精度といった多種多様な移動性能が必要とされます.このような種々の要求へ柔軟に対応可能な移動システムを構築すべく,本研究室では「自律分散型移動体」に着目して,システムが具備すべき条件等について考察しています.最小機能を有する「ユニット」が複数集合することで移動体を構成し,その形態を変化させることで要求機能を満たしつつ行動できるシステムについて,理論と実験の両面から研究を進めています.
 宮原研究室のサイトへ
宮原研究室のサイトへ